
/*
Modified on Mar 16, 2021
Modified by MehranMaleki from Arduino Examples
https://electro
peak.com/learn/
*/
#include "I2Cdev.h"
#include "MPU6050.h"
#include <Adafruit_BMP085.h>
#include <HMC5883L_Simple.h>
MPU6050 accelgyro;
Adafruit_BMP085 bmp;
HMC5883L_Simple Compass;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define LED_PIN 13
bool blinkState = false;
void setup() {
Serial.begin(9600);
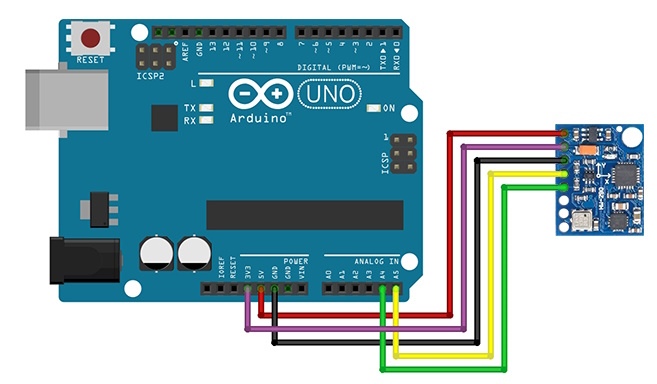
Wire.begin();
// initialize devices
Serial.println("Initializing I2C devices...");
// initialize bmp085
if (!bmp.begin()) {
Serial.println("Could not find a valid BMP085 sensor, check wiring!");
while (1) {}
}
// initialize mpu6050
accelgyro.initialize();
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
accelgyro.setI2CBypassEnabled(true); // set bypass mode for gateway to hmc5883L
// initialize hmc5883l
Compass.SetDeclination(23, 35, 'E');
Compass.SetSamplingMode(COMPASS_SINGLE);
Compass.SetScale(COMPASS_SCALE_130);
Compass.SetOrientation(COMPASS_HORIZONTAL_X_NORTH);
// configure Arduino LED for checking activity
pinMode(LED_PIN, OUTPUT);
}
void loop() {
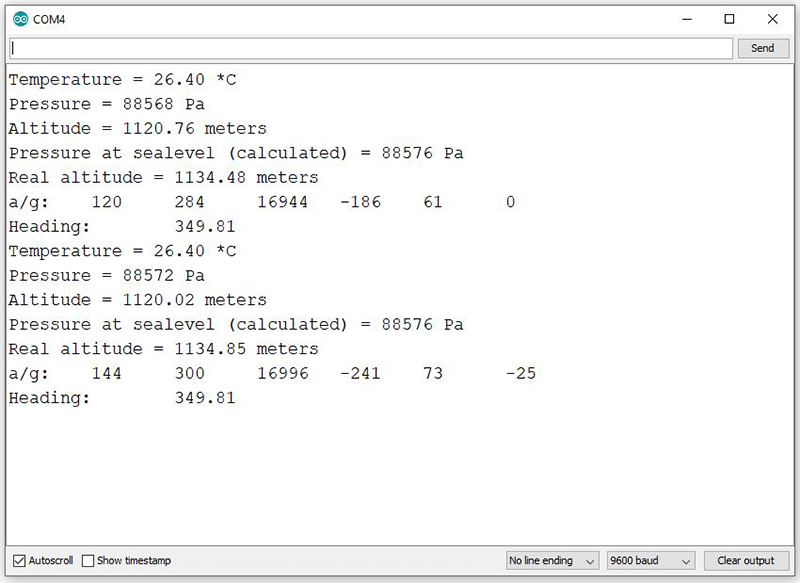
Serial.print("Temperature = ");
Serial.print(bmp.readTemperature());
Serial.println(" *C");
Serial.print("Pressure = ");
Serial.print(bmp.readPressure());
Serial.println(" Pa");
// Calculate altitude assuming 'standard' barometric
// pressure of 1013.25 millibar = 101325 Pascal
Serial.print("Altitude = ");
Serial.print(bmp.readAltitude());
Serial.println(" meters");
Serial.print("Pressure at sealevel (calculated) = ");
Serial.print(bmp.readSealevelPressure());
Serial.println(" Pa");
Serial.print("Real altitude = ");
Serial.print(bmp.readAltitude(101500));
Serial.println(" meters");
// read raw accel/gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// display tab-separated accel/gyro x/y/z values
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
float heading = Compass.GetHeadingDegrees();
Serial.print("Heading: \t");
Serial.println( heading );
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
delay(500);
}
gy-87-10dof.pdf
Vidéo GY-87