¶ Moteur Pas à Pas et L298N
Connecter un un moteur pas à pas bipolaire et lui faire faire 360° en sens horaire puis 360° en sens anti-horaire.
Pour cet exemple, nous aurons besoin d'une carte à base de L298N, d'un moteur PAP bipolaire (4 fils) et d'une alimentation externe de 12 à 24 volts pour l'alimentation de puissance du PAP.
Le pont en H L298 est limité à 12V max.
Ici chaque bobine du moteur PàP consomme 1,3A, soit 2,6 en tout.P = U x I = 12 x 2,6 = 31,2W pour 1 moteur.
Ici l'alimentation 9V permet de vérifier le fonctionnement à vide mais ne permettra des essais en charge.
Un moteur sous alimenté peut avoir des comportements érratiques.
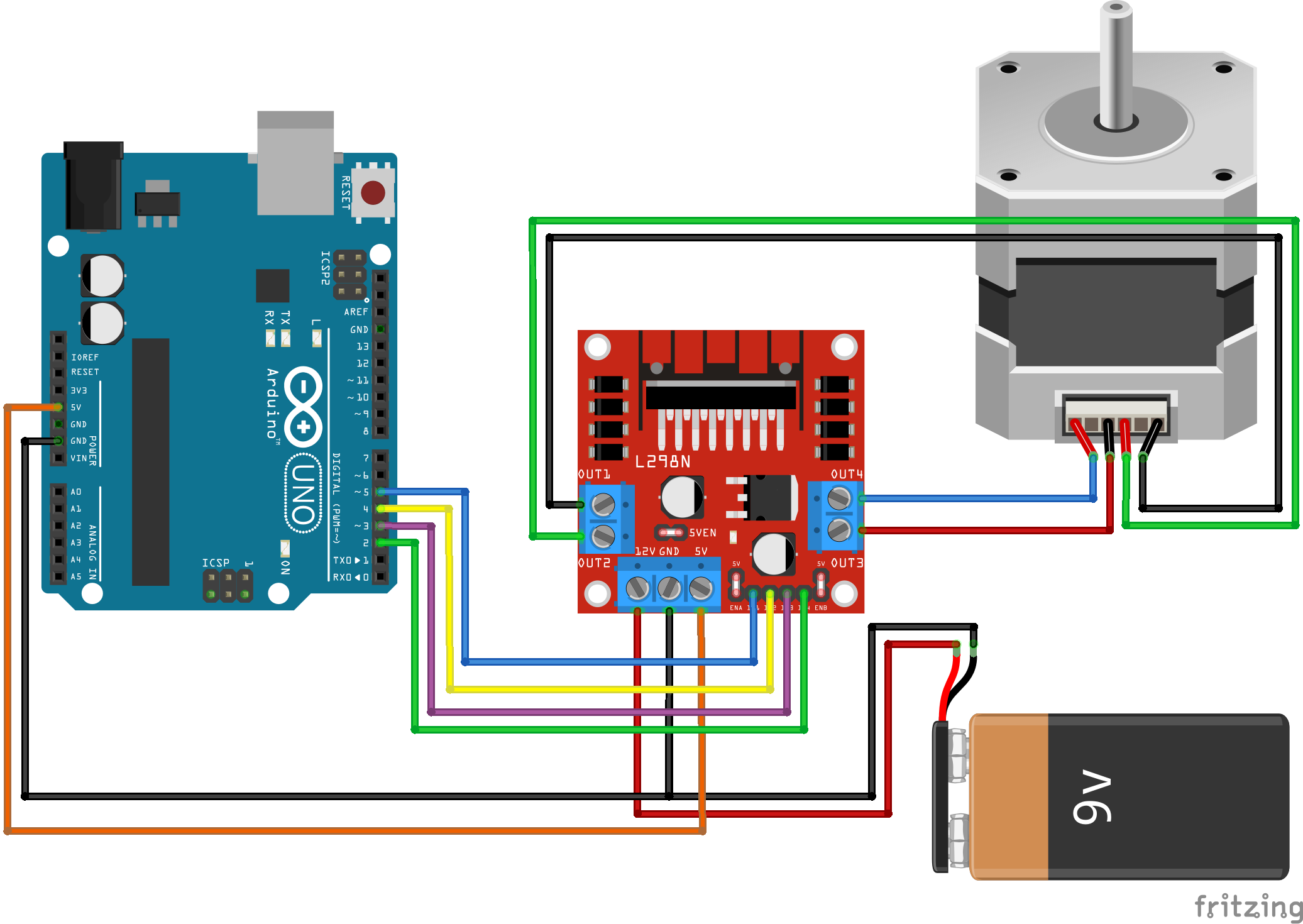
Les 2 cavaliers, blancs de la carte L298N, EN_A et EN_B doivent être positionnés.
Le cavalier 5VEN, alimentation 5V pour la carte Arduino, doit être positionné.
¶ Principe de fonctionnement
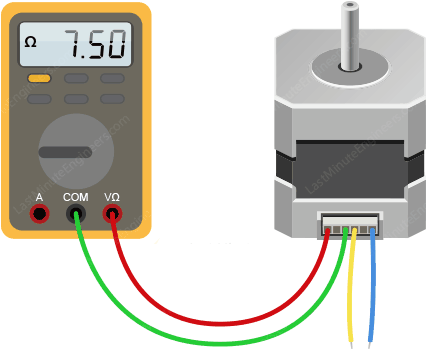
¶ S'assuré de la position des bobines sur le moteur
Le connecteur donne accès à 2 bobines. Il faut les identifier à l'ohmètre.
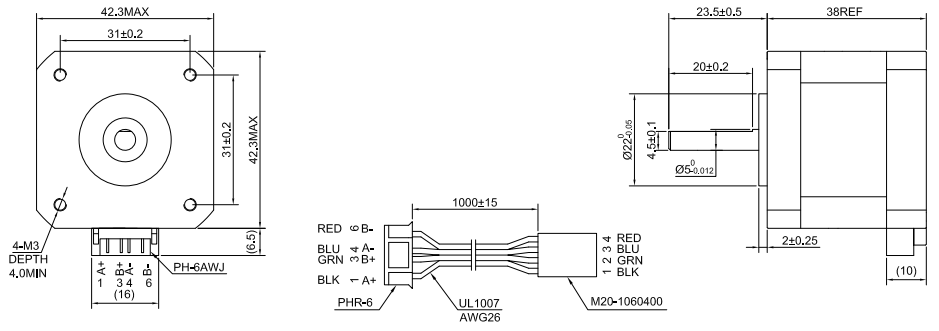
¶ Exemple de moteur

Les bobines peuvent être droites AB et CD ou croisées AC et BD.
¶ Code
/*
Controle de moteur pas à pas avec un L298N
Le moteur est connecté sur les broches 2,3,4 et 5 de l'Arduino
Le fil de masse (GND) est commun aux 2 platines.
*/
#include <Stepper.h>
const int NbPasParTour = 200; // Nombre de pas pour 360 degres 200 -> 360/1.8 = 200
// 400 -> 360/0.9 = 400
Stepper Moteur1(NbPasParTour, 2, 3, 4, 5); // Initialise le moteur sur les broches 2 à 5
void setup()
{
Moteur1.setSpeed(40); //Vitesse de rotation du moteur 40RPM
Serial.begin(9600); //Initialise le moniteur série
}
void loop()
{
Serial.println("Sens horaire"); //On fait 1 tour en sens horaire
Moteur1.step(NbPasParTour);
delay(1000); //Pause 1 seconde
Serial.println("Sens anti-horaire"); //On fait 1 tour en sens anti-horaire
Moteur1.step(-NbPasParTour);
delay(1000);
while(1); //Pause 1 seconde
}