¶ MPU5060

#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include "Wire.h"
// ---------------------------------------------------------------------------
#define SERIALSPEED 19200
#define YAW 0
#define PITCH 1
#define ROLL 2
#define COLCHAR 16
#define LINCHAR 2
#define LCDADDR 0x27
#define AcelX_Offset -2165
#define AcelY_Offset -544
#define AcelZ_Offset 1180
#define GiroX_Offset 59
#define GiroY_Offset 113
#define GiroZ_Offset 41
// --------------------- MPU650 variables ------------------------------------
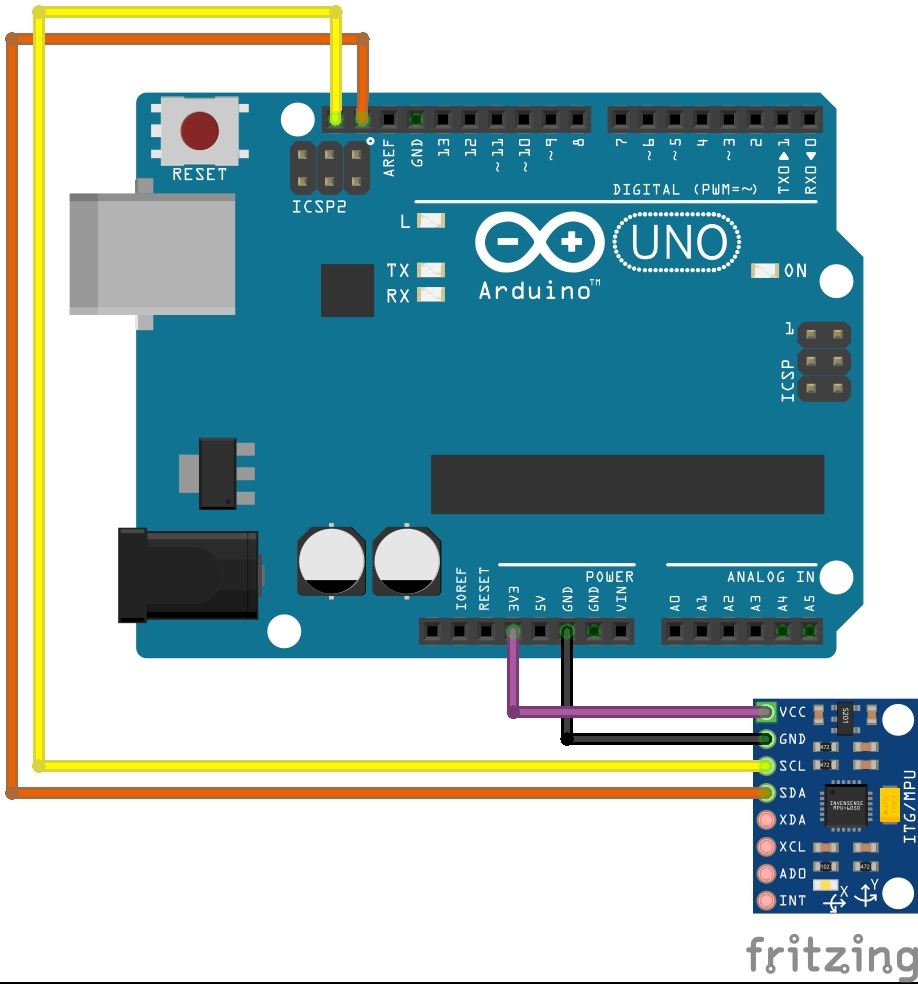
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// Orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorFloat gravity; // [x, y, z] gravity vector
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
volatile bool mpuInterrupt = false; // Indicates whether MPU interrupt pin has gone high
// ---------------------------------------------------------------------------
/**
* Interrup d�tection routine
*/
void dmpDataReady() {
mpuInterrupt = true;
}
/**
* Setup configuration
*/
void setup() {
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
Serial.begin(SERIALSPEED);
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
// Verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// Load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// MPU calibration: set YOUR offsets here.
mpu.setXAccelOffset(AcelX_Offset);
mpu.setYAccelOffset(AcelY_Offset);
mpu.setZAccelOffset(AcelZ_Offset);
mpu.setXGyroOffset(GiroX_Offset);
mpu.setYGyroOffset(GiroY_Offset);
mpu.setZGyroOffset(GiroZ_Offset);
// Returns 0 if it worked
if (devStatus == 0) {
// Turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// Enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0 : #pin2)..."));
attachInterrupt(0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// Set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// Get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
/**
* Main program loop
*/
void loop() {
float Ax, Ay, Az;
// If programming failed, don't try to do anything
if (!dmpReady) {
return;
}
// Wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
mpu.resetFIFO();
Serial.print("Err: mpuInterrupt ");
Serial.print(fifoCount);
Serial.print("/");
Serial.println(packetSize);
}
// Reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// Get current FIFO count
fifoCount = mpu.getFIFOCount();
// Check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
Serial.print("FIFO overflow! ");
Serial.println(fifoCount);
mpu.resetFIFO();
// Otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// Wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) {
fifoCount = mpu.getFIFOCount();
}
// Read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// Track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// Convert Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
// Print angle values in degrees.
Ax = ypr[ROLL] * (180 / M_PI);
Ay = ypr[PITCH] * (180 / M_PI);
Az = ypr[YAW] * (180 / M_PI);
}
}
gy-521_mpu-6050_3-axis_gyroscope_and_acceleration_sensor_en.pdf